A1 and Reachy

Unitree A1 Quadruped Robot
A1 is a highly dynamic quadruped robot with 12 degrees of freedom that offers a large range of capabilities. Its high-torque motors provide enough power to perform complex movements such as jumps and backflips. We use A1 to evaluate the capabilities of our learning algorithms to discover large sets of highly dynamic skills.
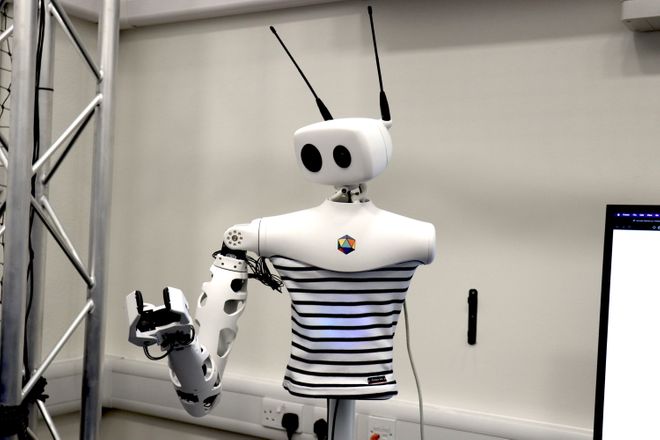
Reachy from Pollen Robotics
Reachy is an anthropomorphic robot with seven degrees of freedom arm, an articulated head with two cameras and tactile and force sensors on its gripper. It is an expressive open-source humanoid platform programmable with Python and ROS. We use Reachy to explore how our algorithms can discover complex interactions with the world, such as tool manipulation.
Hexapod and Quty

AIRL Hexapod
We have designed and built our own hexapod robot and released its design open-source to encourage researchers across the world to reproduce our work. This robot has 18 degrees of freedom and is very modular which offers us a lot of flexibility in our experiments, for instance, to simulate damage situations.

Quty - A small Quadruped Robot
The lab also designed and built a smaller version of a quadruped robot (inspired by the Ant environment from OpenAI Gym). This smaller robot can easily and safely be used on a desk or at home, which enables our students to continue their experiments even when working remotely.
